非常に小さいです。

とことこ歩きます。
付属のコントローラを使えば、こんなに小さいのに歩かせたり回転したりと操縦できるんです。
ゆっくり動けるので、EIZO のモニタの上の縁なども端から端まで歩くことが出来ました。
さらにユニークなのは自律モードがあること。
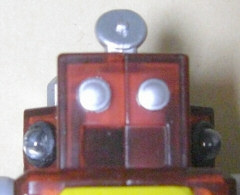
左右に障害物認識ユニット(マニュアルに記載された名称)があって、
障害物をよけたり目の前のものを追跡したりします。
コントローラは TV リモコンのように赤外線を使っています。
ロボット側の赤外線受光部はちょうど顔の位置、正面です。
赤外線なのでおそらくリモコンのようにパルス信号でコマンドを識別しています。
ROBO-Q は A BAND ~ D BAND と 4種類あり、4台までは同時に操作しても混信しません。
前進や回転などの赤外線コマンドも 4セット用意されているのだと考えられます。
ちなみに同じ BAND タイプの ROBO-Q が 2台あると、1つのコントローラで同時に
操作できます。
自律モードではいったいどうやって障害物を見ているんでしょう。
小さいし価格も安いし、あまり複雑な仕組みは使っていないはずです。
障害物認識ユニットはちょうど顔の横についており、それぞれ右側と左側の障害物を
感知できます。
このセンサー赤外線発信部にそっくりです。
おそらく想像ですが、コントローラと同じように左右に赤外線のコマンドを発信して
いるのだと思われます。
赤外線の届く距離をうまく調整すれば、目の前に障害物が来たときだけ反射して
顔の正面の受光部でコマンドを受けることが出来ます。
受光部は共有できるし仕組みも単純にできて非常にうまい方法だと思います。
考えられる赤外線コマンドの種類は下記の通り。
・両足を動かす x3速度
・左足を動かす x3速度
・右足を動かす x3速度
・AI回避モードへ移行
・AI追跡モードへ移行
・右側障害物認識ユニット
・左側障害物認識ユニット
前進は左右のコマンドを同時に送ってるだけかもしれません。
障害物認識ユニットも微弱ながら学習リモコンが反応しました。
まだ障害物の再現は出来ていないので想像の範囲を超えてないです。